Capacitated Vehicle Routing Problem
This notebook shows how to use the PyVRP library to solve the Capacitated Vehicle Routing Problem (CVRP).
A CVRP instance is defined on a complete graph \(G=(V,A)\), where \(V\) is the vertex set and \(A\) is the arc set. The vertex set \(V\) is partitioned into \(V=\{0\} \cup V_c\), where \(0\) represents the depot and \(V_c=\{1, \dots, n\}\) denotes the set of \(n\) customers. Each arc \((i, j) \in A\) has a weight \(d_{ij} \ge 0\) that represents the travel distance from \(i \in V\) to \(j \in V\), which need not to be symmetric and/or euclidean. Each customer \(i \in V_c\) has a demand \(q_{i} \ge 0\). We assume that there is an unlimited number of homogeneous vehicles available, each with maximum capacity \(Q > 0\).
A feasible solution to the CVRP consists of a set of routes that all begin and end at the depot, such that each customer is visited exactly once and none of the vehicles exceed their capacity. The objective is to find a feasible solution that minimizes the total distance.
In the following, we will configure the Hybrid Genetic Search algorithm to solve a single CVRP instance.
Imports
First, we import some utilities and the solver components.
[1]:
from typing import Dict, Optional
from pathlib import Path
from IPython.display import display
import matplotlib.pyplot as plt
import pandas as pd
import vrplib
from pyvrp import (
GeneticAlgorithm,
GeneticAlgorithmParams,
Individual,
PenaltyManager,
Population,
PopulationParams,
ProblemData,
Result,
XorShift128,
diagnostics,
plotting,
read,
)
from pyvrp.crossover import selective_route_exchange as srex
from pyvrp.diversity import broken_pairs_distance as bpd
from pyvrp.educate import (
NODE_OPERATORS,
ROUTE_OPERATORS,
LocalSearch,
NeighbourhoodParams,
compute_neighbours,
)
from pyvrp.stop import MaxIterations, MaxRuntime, StoppingCriterion
Loading the instance
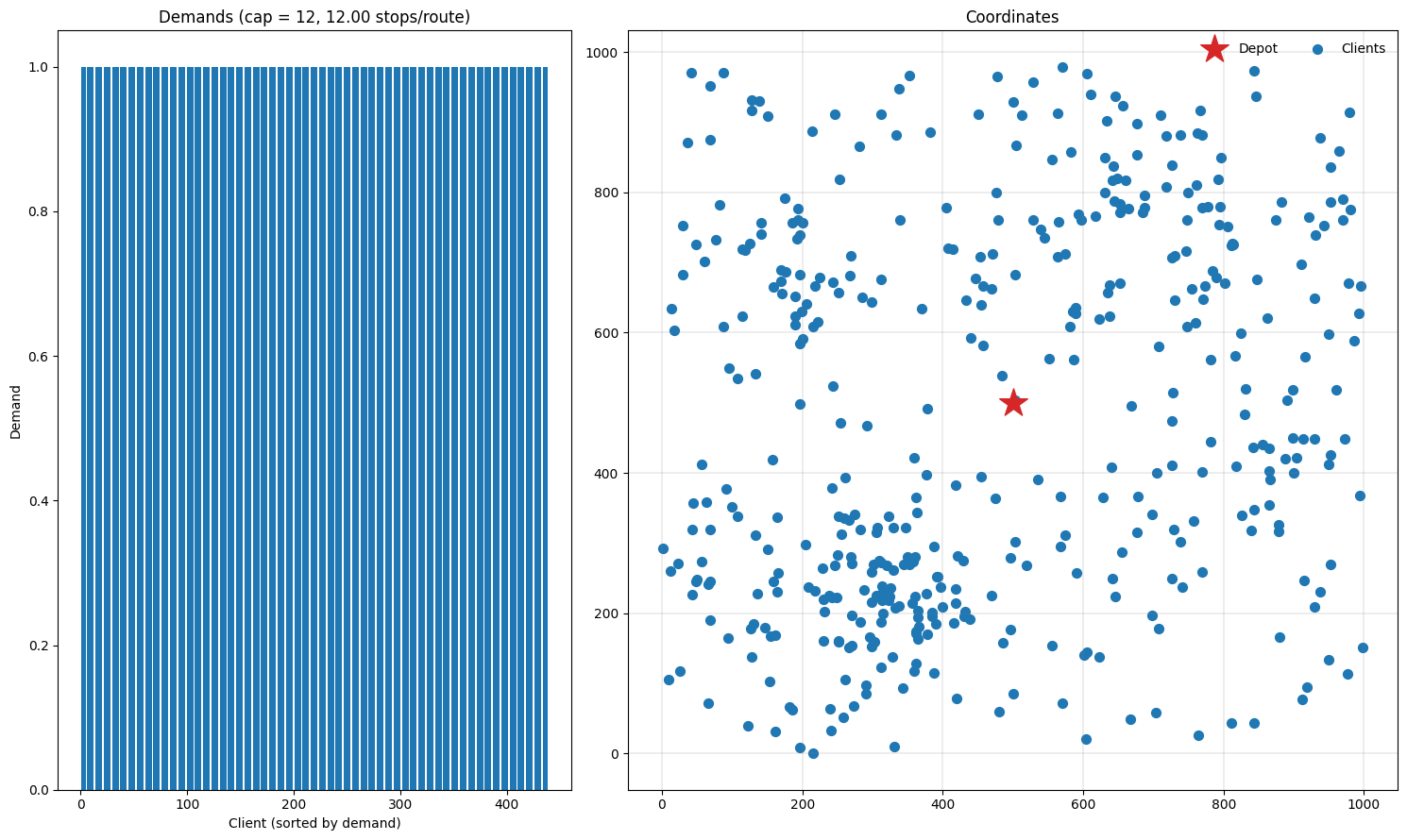
In this notebook we will solve the X-n439-k37 instance, which is part of the X instance set that is widely used to benchmark CVRP algorithms. The function pyvrp.read reads the instance file and converts it to a ProblemData instance. We pass the argument round_func='round' to compute the Euclidean distances rounded to the nearest integral, which is the convention for the X benchmark set. We also load the best known
solution to evaluate our solver later on.
[2]:
instance = read("data/X-n439-k37.vrp", round_func="round")
instance_bks = vrplib.read_solution("data/X-n439-k37.sol")
By default, PyVRP is built to solve routing problems that include time windows. Since CVRP does not include time window data, the pyvrp.read uses placeholder values for customer time windows:
[3]:
instance.client(1).tw_late
[3]:
556652
This value is computed by taking the maximum route duration (number of clients \(\times\) (maximum arc distance + maximum service time)). As a result, the time window constraints are always feasible and we can solve an instance of CVRP using a VRPTW solver.
Plotting the instance
Let’s plot the instance and see what we have. The function plotting.plot_demands will plot the demands of the instance: in this case, all customers have 1 demand. plotting.plot_coordinates plots the customer coordinates of the instance.
[4]:
fig = plt.figure(figsize=(15, 9))
gs = fig.add_gridspec(2, 2, width_ratios=(2 / 5, 3 / 5))
plotting.plot_demands(instance, ax=fig.add_subplot(gs[:, 0]))
plotting.plot_coordinates(instance, ax=fig.add_subplot(gs[:, 1]))
plt.tight_layout()
Configuring Hybrid Genetic Search
The next step is to implement a solve function that sets up the necessary components of the Hybrid Genetic Search. The components include Population, LocalSearch, and the PenaltyManager. Using these components, we can then initialise the GeneticAlgorithm object and run it until our desired StoppingCriterion is met.
[5]:
def solve(
data: ProblemData,
seed: int,
max_runtime: Optional[float] = None,
max_iterations: Optional[int] = None,
**kwargs,
):
rng = XorShift128(seed=seed)
pen_manager = PenaltyManager()
pop_params = PopulationParams()
pop = Population(bpd, params=pop_params)
nb_params = NeighbourhoodParams(nb_granular=20)
neighbours = compute_neighbours(data, nb_params)
ls = LocalSearch(data, rng, neighbours)
for op in NODE_OPERATORS:
ls.add_node_operator(op(data))
for op in ROUTE_OPERATORS:
ls.add_route_operator(op(data))
init = [
Individual.make_random(data, rng)
for _ in range(pop_params.min_pop_size)
]
ga_params = GeneticAlgorithmParams(collect_statistics=True)
algo = GeneticAlgorithm(
data, pen_manager, rng, pop, ls, srex, init, params=ga_params
)
if max_runtime is not None:
stop = MaxRuntime(max_runtime)
else:
assert max_iterations is not None
stop = MaxIterations(max_iterations)
return algo.run(stop)
Solving the instance
Now let’s run the algorithm using our solve function and compare the result with the best known solution. To compute the cost for the solution, we need a CostEvaluator instance. We can get it from the penalty manager.
[6]:
def report_gap(best_cost: float, bks: Dict):
objective = best_cost
bks_cost = bks["cost"]
pct_diff = 100 * (objective - bks_cost) / bks_cost
print(f"Found a solution with cost: {objective}.")
print(f"This is {pct_diff:.1f}% worse than the best known", end=" ")
print(f"solution, which is {bks_cost}.")
cost_evaluator = PenaltyManager().get_cost_evaluator()
result = solve(instance, seed=42, max_runtime=30)
report_gap(cost_evaluator.cost(result.best), instance_bks)
Found a solution with cost: 36481.
This is 0.2% worse than the best known solution, which is 36391.
We’ve managed to find a near-optimal solution in 30 seconds! Let’s plot the results.
[7]:
def plot_result(result: Result, instance: ProblemData):
fig = plt.figure(figsize=(15, 9))
plotting.plot_result(result, instance, fig)
fig.tight_layout()
plot_result(result, instance)
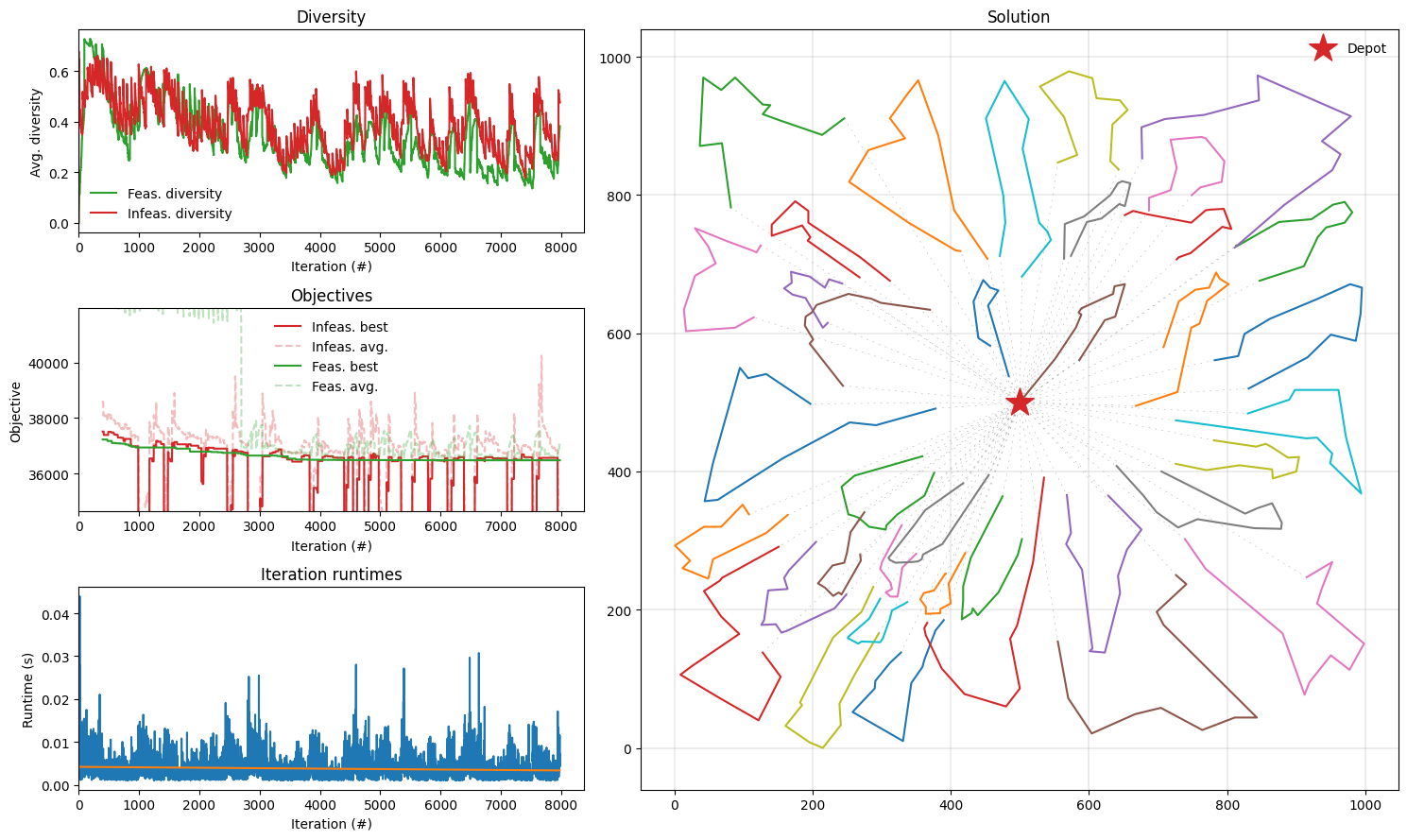
Conclusion
In this notebook, we implemented the Hybrid Genetic Search algorithm to solve a CVRP instance with 493 customers to near-optimality. Moreover, we demonstrated how to use the plotting tools to visualize the instance and statistics obtained throughout the search procedure.